Inspiration
As long as I could remember, I have been fascinated by engineering endeavors. This is the reason why I applied for the Space and Engineering Academy that I attended during highschool where I was able to develop a fundamental understanding of engineering principles. It's also the reason why I partook in Robotics throughout all of highschool. When I was getting started as a Freshman at UCI and heard about being able to build a quadcopter from scratch, it not only sounded familiar to me, but it seemed like the perfect opportunity to improve upon my engineering fundamentals.

Development
For this project, I was a part of a team of 5 that was tasked to design and build an autonomous quadcopter from scratch over the course of 7 months. The plan was to research and design for the first 2 months, fabricate and assemble in the next 2 months, and the final 3 months would be for testing, adjustments, and improvements. Throughout this time we would also be following an AGILE workflow where we would present our sprint deadlines to the officials who had tasked us with this project.
We designed the quadcopter using Solidworks, and fabricated the quadcopter using the UCI engineering facilities. I was already familiar with CAD software because I had used CREO, another CAD software, throughout all of highschool for Robotics and multiple classes in my engineering program. Thus, the learning curve for solidworks was minimal and I became the main CAD designer on our team.
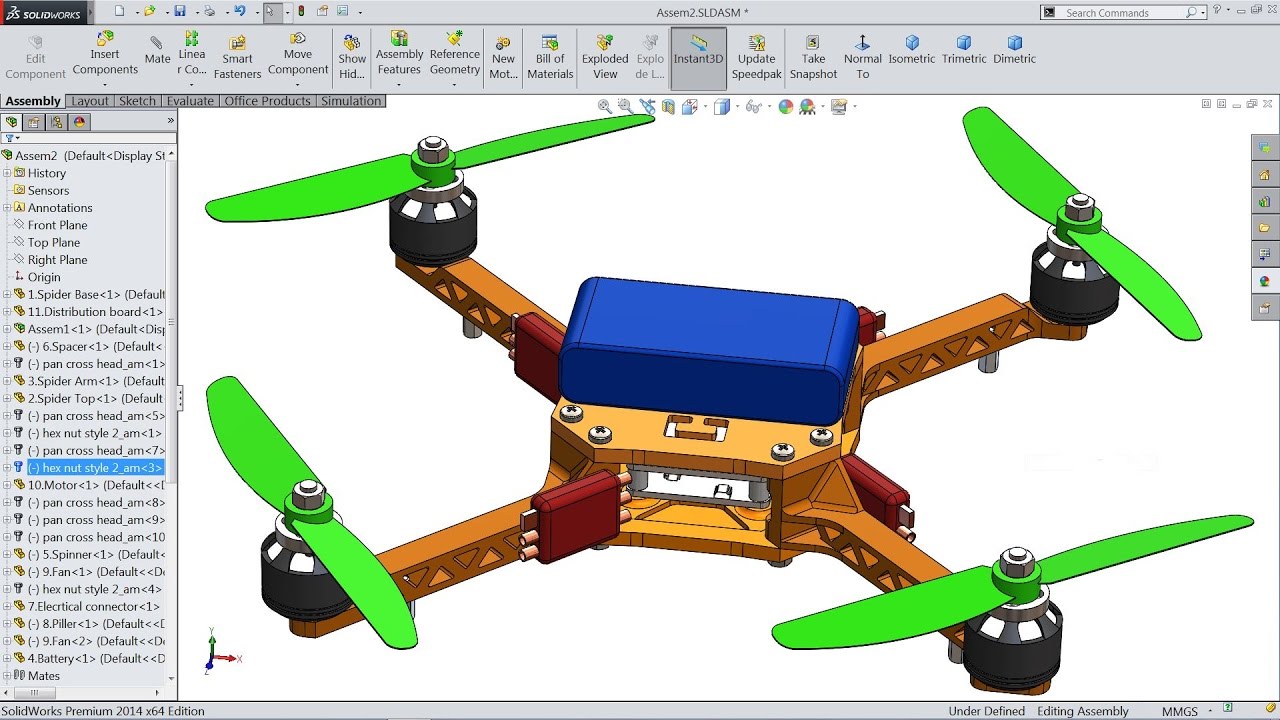
We not only had to learn and fully understand the physics of a quadcopter, but we also needed to research different materials in order to figure out which materials would best fit our design goals. After meticulous deliberation, we decided on using a polycarbonate material for the majority of our quadcopter, with 3D printed supplementary parts. The idea behind our design was a light quadcopter with a center cage to hold the batteries, wires, sensors, arduino board, etc. We used the arduino board and sensors in order to record metrics such as height, angle, and acceleration, which are integral inputs necessary for automation. Arduino uses a simplified version of C++, and so implementing our autonomous system was straightforward in regards to language.
What I Learned
I learned a lot about how to use industrial grade tools while fabricating our quadcopter. I also learned how important using an efficient algorithm is when implementing a time sensitive system. For our autonomous quadcopter, we had to process input from sensors, interpret the input data, devise the optimal reaction, then translate our desired reaction through output. This pipeline can easily be bogged down by a single inefficient algorithm at any of the stages, and so we had to work diligently to ensure an optimal solution.